Как создавалась первая и единственная методика поверки SLAM сканеров
Долгое время мобильные лазерные системы, работающие на базе алгоритмов SLAM (Simultaneous Localization and Mapping), воспринимались на отечественном рынке скорее как высокотехнологичные гаджеты для съемок, нежели как серьезные измерительные приборы. Ситуация кардинально изменилась благодаря инициативе компании РУСГЕОКОМ, и в частности ее ведущего метролога Капустина Владимира Андреевича, который фактически проложил дорогу для официального признания этой технологии в российском правовом поле.

Что такое методика поверки и зачем она нужна
Методика поверки — это обязательный нормативный документ, который устанавливает четкую процедуру подтверждения точности прибора. Разработка такого документа включает четыре ключевых этапа: глубокий анализ характеристик устройства, написание текста по строгим стандартам ГОСТ, проведение метрологической экспертизы с апробацией и, наконец, официальное утверждение в составе типа средств измерений. Для геодезического оборудования это критически важно, так как разработчик обязан обеспечить прослеживаемость измерений к государственному первичному эталону, используя только те инструменты, которые сами внесены в реестр и проверены. Без этого документа результаты съемок не имеют юридической силы.

Рождение метрологии SLAM в России
Официальные методики для коммерческих SLAM-сканеров начали появляться только на рубеже 2024–2025 годов. До этого момента специалисты пытались применять к ним подходы от классических наземных сканеров, но это было тупиковым путем. У мобильных систем нет фиксированного центра вращения, они снимают в движении, а их итоговая точность зависит не только от дальномера, но и от сложной связки инерциальной системы (IMU) и алгоритмов обработки траектории.
Создатели новой методики совершили настоящий прорыв: они доказали Росстандарту, что SLAM-сканеры — это не просто дальномеры, а полноценные координатно-измерительные системы. В основу поверки легло определение погрешности приращений координат внутри облака точек.

Как устроена методика и кто ее автор
Методика, разработанная для линейки XGRIDS Lixel, была официально утверждена Приказом Росстандарта № 1474 от 21 июля 2025 года. Её разработку инициировала и полностью профинансировала компания РУСГЕОКОМ, взяв на себя всю инженерную и административную нагрузку.
Особенность этой поверки заключается в жестком контроле двух параметров:
- Точность взаимного положения точек в пространстве: проверяется, насколько корректно сканер вычисляет расстояния между объектами на основе измерения разницы между координатами двух точек в едином массиве данных.
- Идентификация программного обеспечения: метрологи фиксируют версию софта и контрольные суммы алгоритмов сшивки. Это гарантирует, что пользователь применяет сертифицированные алгоритмы, не искажающие геометрию объекта.
Физический процесс поверки
Процедура проходит на специальном эталонном 3D-полигоне. В компании РУСГЕОКОМ для этого используется собственный пространственный эталонный базис 3-го разряда. На пилонах полигона закрепляются контрастные марки или сферы, координаты которых заранее определены прецизионным тахеометром с точностью до долей миллиметра.
Специалист берет сканер, запускает запись и обходит полигон по определенной траектории, сканируя эти марки. Главная задача специалиста — удостовериться в том, что заявленная в описании типа погрешность соблюдается во всём диапазоне измерений прибора.
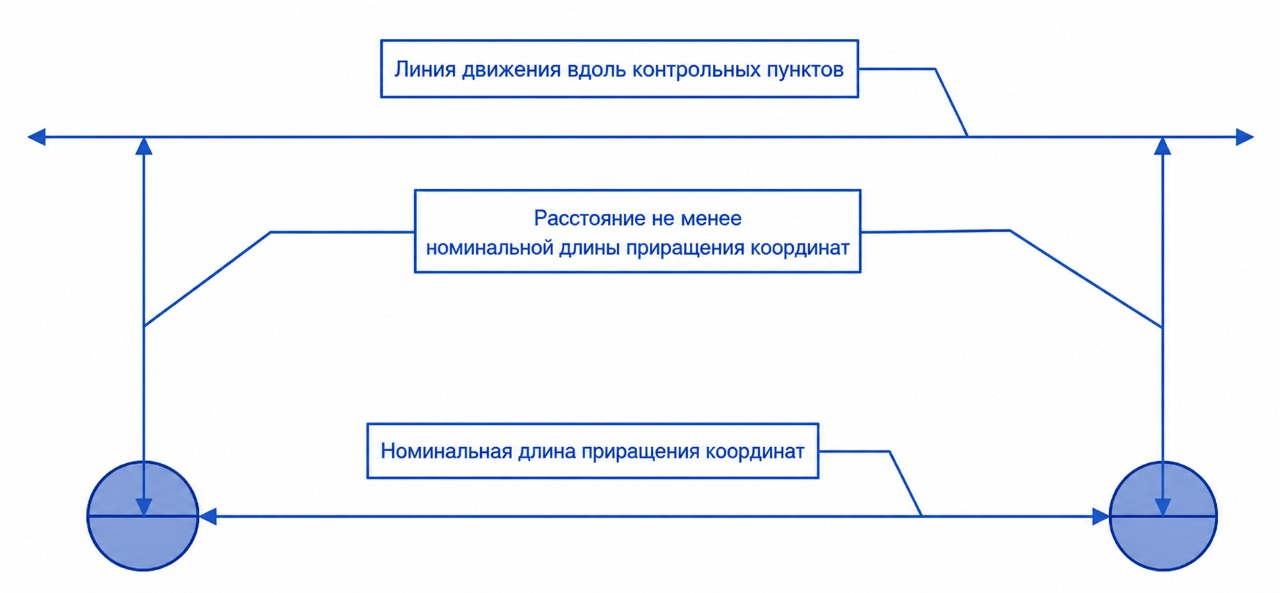
В отличие от классических сканеров, которые производят замеры с определенной точки, SLAM-сканер должен быть в постоянном движении. Важнейшая особенность поверки такого оборудования заключается в комплексной оценке точности как измерений, так и алгоритма позиционирования. Ключевым моментом является траекторное сканирование между двумя опорными пунктами с известными геодезическими координатами. При этом длина траектории и удаление сканера от каждого пункта должны быть не менее номинальной длины приращения координат. В случае простого движения между пунктами искусственно завышается погрешность, которая не отражает реальную точность SLAM‑системы, а только указывает на ее способность "привязываться" к известным точкам. Это не соответствует реальным условиям эксплуатации, когда сканер часто работает без постоянной привязки к опорной сети.
Затем полученное облако точек обрабатывается в специализированном ПО, которое автоматически сравнивает измеренные расстояния между центрами марок с эталонными значениями из паспорта полигона. Если разница не превышает установленные допуски, прибор признается годным.
Практическая значимость и вклад компании РУСГЕОКОМ
Внесение XGRIDS в Государственный реестр (ГРСИ № 95947-25) летом 2025 года устранило юридический вакуум. Теперь данные поверки автоматически передаются во ФГИС "АРШИН", что позволяет легально использовать материалы SLAM-сканирования для самых ответственных задач:
- Подготовки исполнительной документации в строительстве.
- Прохождения государственной экспертизы проектов.
- Маркшейдерских работ и подсчета объемов в горном деле.
- Кадастрового учета сложных объектов.
В процессе создания этих документов инженеры и метрологи РУСГЕОКОМ столкнулись с серьезными вызовами. Им пришлось детально раскрывать математические принципы работы алгоритмов сшивки облаков точек и адаптировать классические требования ГОСТов под динамическую съемку на ходу. В результате этой работы российское геодезическое сообщество получило не просто новый инструмент, а законную возможность применять передовые SLAM-технологии в крупнейших инфраструктурных проектах страны.



